

5. Discrete Rigid Contact#
5.1. Goal#
Compare co-simulation with a monolithic Modelica reference for rigid wall contact, and show convergence as communication step size decreases.
5.2. Model Map#

5.3. Assumptions and Scope#
Rigid wall contact (event-driven)
Fixed-step co-simulation; reference uses variable-step DASSL
5.4. Prerequisites and Setup#
import numpy as np
import matplotlib.pyplot as plt
from OMPython import ModelicaSystem
from demos.ControlledPendulum.src.master_pendulum import MasterPendulum, FMUPendulum
import demos.ControlledPendulum.src.master_pendulum.components.fem.pendulum_config as config
from syssimx import FMUComponent, System, SystemGraphVisualizer, Connection, EventConnection
5.5. Discover FMUs#
PLATFORM = sys.platform
demo_dir_path = _repo / "demos" / "ControlledPendulum"
package_path = Path(demo_dir_path / "src/modelica/ControlledPendulum")
fmu_output_dir = Path(demo_dir_path / f"artifacts/fmus/{PLATFORM}")
fmu_paths = {}
for subdir in fmu_output_dir.iterdir():
if subdir.is_dir():
fmu_paths[subdir.name] = {}
for fmu_file in subdir.glob("*.fmu"):
fmu_paths[subdir.name][fmu_file.stem] = fmu_file
else:
fmu_paths[subdir.stem] = subdir
5.6. Modelica Reference Simulation#
We refer to the monolithic Modelica simulation as “Modelica” in the following. The simulation results are obtained by running the RigidContact example model in OpenModelica using the OMPython interface. The model can be found in the demos/ControlledPendulum/src/modelica/ControlledPendulum/Examples/Contact/RigidContact.mo package.
5.6.1. PID without Integrator Reset on Contact#
from OMPython import ModelicaSystem
reference = ModelicaSystem(fileName=str(package_path / "package.mo"),
modelName="ControlledPendulum.Examples.Contact.RigidContact")
reference.setParameters({'useReset': 'false'})
reference.buildModel()
simargs = {
"stopTime": 0.4,
"stepSize": 0.001,
}
reference.simulate(simargs=simargs)
ref_sol_names = ('time', 'theta', 'theta_ref', 'theta_meas', 'pid.I_out', 'pendulum.contact')
ref_sol_noreset = {name: reference.getSolutions(name).flatten() for name in ref_sol_names}
reference._simulate_options
{'startTime': '0',
'stopTime': '1',
'stepSize': '0.001',
'tolerance': '1e-06',
'solver': 'dassl',
'outputFormat': 'mat'}
5.6.2. PID with Integrator Reset on Contact#
reference.setParameters({'useReset': 'true'})
reference.buildModel()
reference.simulate(simargs=simargs)
ref_sol_reset = {name: reference.getSolutions(name).flatten() for name in ref_sol_names}
5.6.3. Compare Modelica Results#
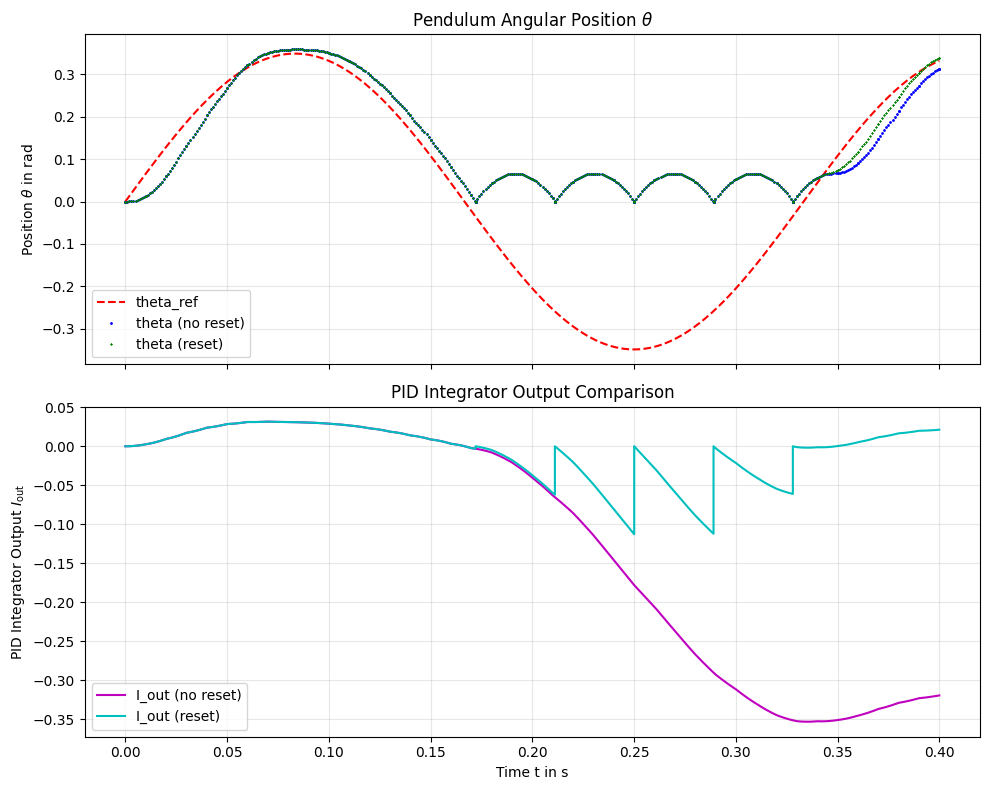
The figure illustarates the windup of the PID controller’s integrator state when the pendulum hits the wall. The error between the reference and measured angle adds up in the integrator.
When the reference position crosses the wall angle, the controller without integrator reset is not able to recover immediately, as the integrator state is large and needs to be unwound.
In contrast, the controller with integrator reset is able to recover immediately, as the integrator state is reset to zero at contact. There is no error left to unwind, and the controller can react immediately to the reference position crossing the wall angle.
5.7. Instantiate FMU Components#
def print_parameteres(component: FMUComponent):
print(f"Parameters of {component.name}:")
for name, param in component.parameters.items():
if '.' not in name and param is not None:
print(f" - {name}: {param}")
5.7.1. Setpoint#
setpoint = FMUComponent(name="Setpoint",
fmu_path=fmu_paths['Trajectories']["SetPoint"],
group="Reference")
print_parameteres(setpoint)
Parameters of Setpoint:
- amplitude: 0.3490658503988659 rad
- frequency: 3.0 Hz
- offset: 0.0 rad
- phase: 0.0 rad
5.7.2. PID Controller#
class PIDController(FMUComponent):
def __init__(self, name):
fmu_path = fmu_paths['Controllers']['PIDControllerReset_euler']
super().__init__(name=name, fmu_path=fmu_path, group="Controller")
self.use_reset = False # Flag to control whether to apply reset on event
def _handle_events_internal(self, event_names, t):
if "wall_hit" not in event_names:
return
self.set_inputs({"resetI": True})
self.do_step(t, 0) # Perform a step to apply the resetI input
self.set_inputs({"resetI": False})
pid = PIDController(name="PID")
print_parameteres(pid)
Parameters of PID:
- Kd: 0.02
- Ki: 8.0
- Kp: 12.0
- uMax: 1.0
- uMin: -1.0
5.7.3. Drive#
drive = FMUComponent(name="Drive",
fmu_path=fmu_paths['Actuators']["DriveDynamic"],
group="Actuator")
print_parameteres(drive)
Parameters of Drive:
- I_max: 10.0 A
- L_arm: 0.000121 H
- R_arm: 0.151 Ohm
- V_rated: 48.0 V
- V_supply: 16.0 V
- eta: 0.85
- gearRatio: 60.0
- k_t: 0.03 m·N/A
- n_0: 12916.0 1/min
5.7.4. Pendulum#
pendulum = FMUPendulum(name="Pendulum",solver="cvode")
def wall_contact_indicator(comp: FMUPendulum) -> float:
theta = comp.get_outputs()["theta"]
theta_wall = 0
return theta - theta_wall
pendulum.add_event_indicator("wall_hit", func=wall_contact_indicator, direction=-1)
5.7.5. Angle Sensor and Decoder#
angle_sensor = FMUComponent(name="Angle Sensor",
fmu_path=fmu_paths['Sensors']['AngleSensor'],
group="Sensors")
print_parameteres(angle_sensor)
Parameters of Angle Sensor:
- pot_range: 4.71238898038469 rad
- r_bottom: 20000.0 Ohm
- r_top: 80000.0 Ohm
- samplePeriod: 0.01 s
- theta_max: 0.45378560551852565 rad
- theta_min: -0.45378560551852565 rad
- v_adc: 3.0 V
- v_pot: 5.0 V
- nBits: 10
angle_decoder = FMUComponent(name="Angle Decoder",
fmu_path=fmu_paths['Sensors']['AngleDecoder'],
group="Signal Processing")
print_parameteres(angle_decoder)
Parameters of Angle Decoder:
- pot_range: 4.71238898038469 rad
- r_bottom: 20000.0 Ohm
- r_top: 80000.0 Ohm
- samplePeriod: 0.01 s
- theta_max: 0.45378560551852565 rad
- theta_min: -0.45378560551852565 rad
- v_adc: 3.0 V
- v_pot: 5.0 V
- nBits: 10
5.8. Define Connections#
c1 = Connection(
src_comp=setpoint.name,
src_port=setpoint.output_specs["theta_ref"].name,
dst_comp=pid.name,
dst_port=pid.input_specs["theta_ref"].name,
)
c21 = Connection(
src_comp=pendulum.name,
src_port=pendulum.output_specs["theta"].name,
dst_comp=angle_sensor.name,
dst_port=angle_sensor.input_specs["theta"].name,
)
c22 = Connection(
src_comp=angle_sensor.name,
src_port=angle_sensor.output_specs["v_out"].name,
dst_comp=angle_decoder.name,
dst_port=angle_decoder.input_specs["v_in"].name,
)
c23 = Connection(
src_comp=angle_decoder.name,
src_port=angle_decoder.output_specs["theta"].name,
dst_comp=pid.name,
dst_port=pid.input_specs["theta_meas"].name,
)
c3 = Connection(
src_comp=pid.name,
src_port=pid.output_specs["u"].name,
dst_comp=drive.name,
dst_port=drive.input_specs["u_control"].name,
)
c4 = Connection(
src_comp=drive.name,
src_port=drive.output_specs["torque"].name,
dst_comp=pendulum.name,
dst_port=pendulum.input_specs["tau"].name,
)
c5 = Connection(
src_comp=pendulum.name,
src_port=pendulum.output_specs["omega"].name,
dst_comp=drive.name,
dst_port=drive.input_specs["omega"].name,
)
event_connection_1 = EventConnection(
src_comp=pendulum.name,
src_port="wall_hit",
dst_comp=pendulum.name,
dst_port=pendulum.input_specs["omega_invert"].name,
)
event_connection_2 = EventConnection(
src_comp=pendulum.name,
src_port="wall_hit",
dst_comp=pid.name,
dst_port=pid.input_specs["resetI"].name,
)
connections = [c1, c21, c22, c23, c3, c4, c5]
components = [setpoint, pid, drive, pendulum, angle_decoder, angle_sensor]
5.9. Build and Initialize the System - No Reset#
system = System(name="Pendulum System with Rigid Contact and PID Integrator Reset")
for comp in components:
system.add_component(comp)
for conn in connections:
system.add_connection(conn)
system.add_event_connection(event_connection_1)
system.add_event_connection(event_connection_2)
system.initialize(t0=0.0)
5.10. Visualize the System Graph#
visualizer = SystemGraphVisualizer(system)
visualizer.visualize()
Warning: Could not load "C:\Users\flori\anaconda3\envs\env-312\Library\bin\gvplugin_pango.dll" - It was found, so perhaps one of its dependents was not. Try ldd.
Warning: Could not load "C:\Users\flori\anaconda3\envs\env-312\Library\bin\gvplugin_pango.dll" - It was found, so perhaps one of its dependents was not. Try ldd.

5.11. Baseline Run#
t = 0
t_end = 0.4
dt = 5e-4
system.reset()
system.initialize(t0=t)
system.run(t0=t, tf=t_end, dt=dt)
5.12. Collect Results#
history = system.get_history()
t_set_point = history[setpoint.name][0]
theta_ref = history[setpoint.name][1]['theta_ref']
t_pendulum = history[pendulum.name][0]
theta_pendulum = history[pendulum.name][1]['theta']
t_pid = history[pid.name][0]
I_out = history[pid.name][1]['I_out']
5.13. Plot: Baseline Tracking vs Reference#
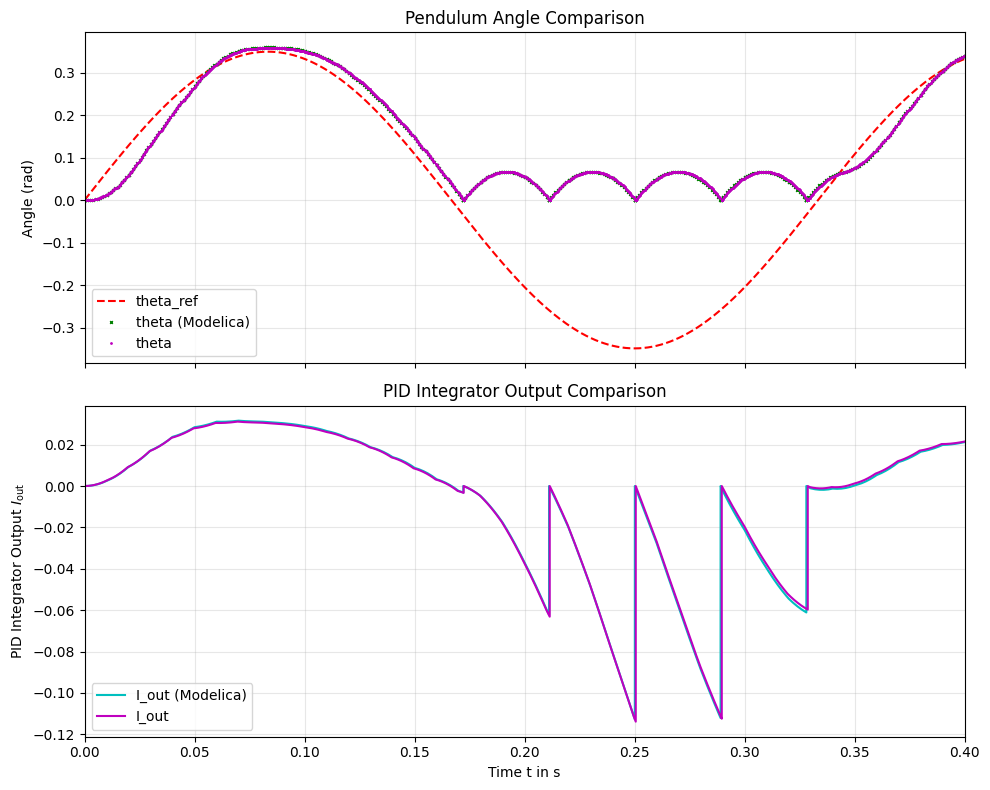
The figure below compares the pendulum angle and PID integrator output from the co-simulation with the Modelica reference.
It can be observed that the co-simulation using the hybrid master algorithm closely follows the Modelica reference.
The contact events are captured accurately, and the integrator output shows the expected reset behavior at contact.
The deviations between the co-simulation and reference are minimal, but originate from the different numerical solvers and fixed vs variable step sizes.
5.14. Summary#
Co-simulation trajectories converge toward the monolithic reference as
dtdecreases.Resetting the PID integrator reduces windup after contact events.