

1. Master Pendulum: Basics#
This notebook focuses on the switching and synchronization logic used by the
MasterPendulum, without instantiating the class itself. We reproduce the core
steps manually so the mechanics of mode switching are explicit and easy to verify.
1.1. Overview#
Import the FMU, OpenSim, and FEM pendulum components.
Verify that their port interfaces are compatible (name, type, direction, and unit).
Synchronize rigid-body parameters using the FEM model as reference.
Define a simple rigid-body reference trajectory for validation.
Check consistent initial conditions across models.
Define a time-based mode selector.
Define state adaptation for switching.
Run a short multi-model simulation with manual switching.
Record synchronization events and compare outputs against the reference.
1.2. Learning Goals#
Understand the switching and synchronization workflow used in
MasterPendulum.Verify port compatibility across heterogeneous models.
Synchronize parameters so models represent the same physical pendulum.
Implement a mode selector and state adaptation for switching.
Validate switching behavior with a reference trajectory and event log.
1.3. Prerequisites and Setup#
Review the individual model tutorials before this notebook:
FMUPendulum(Modelica / FMU)OpenSimPendulumFEMPendulum
For reference, the full implementation lives in:
demos/ControlledPendulum/src/master_pendulum/orchestration/master_pendulum.pysyssimx/core/multi_comp.py
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
from syssimx import CoSimComponent
from syssimx.core.port import PortSpec
1.4. Implementation#
1.4.1. Pendulum Model Import and Instantiation#
We reuse the pendulum component implementations from the demo directory.
from demos.ControlledPendulum.src.master_pendulum.components import (
FEMPendulum,
FMUPendulum,
OpenSimPendulum,
)
fmu = FMUPendulum(name="FMUPendulum", solver="cvode")
opensim = OpenSimPendulum(name="OpenSimPendulum")
fem = FEMPendulum(name="FEMPendulum")
1.4.2. Verify Port Interfaces#
All submodels must expose the same external interface so a multi-model wrapper can switch between them without rewiring the system.
The input and output ports are the interfaces to other components in syssimx.
To use multiple models inside one wrapper, the port specs must be compatible:
same port names
same type and direction
compatible units
We use the same compatibility logic as MultiComponent._unify_ports.
models: dict[str, CoSimComponent]
models = {"FMU": fmu, "OpenSim": opensim, "FEM": fem}
from syssimx.core.port import PortSpec
def check_port_compatibility(models, spec_attr, label):
ref_name, ref_model = next(iter(models.items()))
ref_specs = getattr(ref_model, spec_attr)
all_ok = True
for model_name, model in models.items():
specs = getattr(model, spec_attr)
missing = sorted(set(ref_specs) - set(specs))
extra = sorted(set(specs) - set(ref_specs))
if missing or extra:
all_ok = False
print(f"{label} ports mismatch: {model_name} vs {ref_name}")
if missing:
print(f" Missing in {model_name}: {missing}")
if extra:
print(f" Extra in {model_name}: {extra}")
for port_name in sorted(set(ref_specs) & set(specs)):
ref_spec = ref_specs[port_name]
spec = specs[port_name]
name_ok = (ref_spec.name == port_name == spec.name)
dir_ok = (ref_spec.direction == spec.direction)
type_ok = (ref_spec.type == spec.type)
unit_ok = PortSpec.compatible(ref_spec, spec)
if not (name_ok and dir_ok and type_ok and unit_ok):
all_ok = False
print(f" Incompatible port '{port_name}':")
print(f" {ref_name}: {ref_spec}")
print(f" {model_name}: {spec}")
if all_ok:
print(f"All {label.lower()} ports are compatible across models.")
else:
raise ValueError("Port specifications are not compatible. See output above.")
check_port_compatibility(models, "input_specs", "Input")
check_port_compatibility(models, "output_specs", "Output")
All input ports are compatible across models.
All output ports are compatible across models.
1.4.3. Parameter Synchronization#
After port compatibility is verified, we align the physical parameters across models. We use the FEM model as reference because it computes mass, inertia, and equivalent length from geometry and material properties.
from demos.ControlledPendulum.src.master_pendulum.components.fem import pendulum_config as config
init_params = config.InitialConditionParameters()
init_params.angular_position_deg = np.rad2deg(0.3) # Initial angle
init_params.angular_velocity = 1.0
q0 = np.deg2rad(init_params.angular_position_deg)
init_params.drive_torque = 0 # Nm
mat_params = config.MaterialParameters()
mat_params.E_pendulum = 2.1e11 # Young's modulus for the pendulum
mat_params.nu_pendulum = 0.3 # Poisson's ratio for the pendulum
mat_params.rho_pendulum = 7800 # Density for the pendulum
sim_params = config.SimulationParameters()
sim_params.tau = 0.01
sim_params.t_end = 2
sim_params.with_contact = False
sim_params.use_gravity = True
contact_params = config.ContactParameters()
contact_params.kn = 1e10
anim_params = config.AnimationParameters()
anim_params.animate = True
fem_parameters = {
'mat_params': mat_params,
'contact_params': contact_params,
'init_params': init_params,
'sim_params': sim_params,
'anim_params': anim_params,
}
fem.set_parameters(**fem_parameters)
fem.initialize(t0=0)
1.4.3.1. Extract parameters from the initialized FEMPendulum#
theta0_deg = fem.init_params.angular_position_deg
omega0 = fem.init_params.angular_velocity
pendulum_mass = fem.mass
pendulum_length = fem._equivalent_length
pendulum_inertia = fem.inertia
print(f"Extracted parameters from FEM model:")
print(f" theta0: {theta0_deg:.2f} degrees")
print(f" omega0: {omega0:.4f} rad/s")
print(f" Mass: {pendulum_mass:.4f} kg")
print(f" Length: {pendulum_length:.4f} m")
print(f" Inertia: {pendulum_inertia:.4f} kg*m^2")
Extracted parameters from FEM model:
theta0: 17.19 degrees
omega0: 1.0000 rad/s
Mass: 10.8430 kg
Length: 0.1817 m
Inertia: 0.4423 kg*m^2
1.4.3.2. Synchronize FMUPendulum and OpenSimPendulum#
The FMU and OpenSim models are updated to match the FEM-derived mass, length, and inertia.
opensim.parameters['InitialConditions']['theta_start'] = np.deg2rad(theta0_deg)
opensim.parameters['InitialConditions']['omega_start'] = omega0
opensim.parameters['Model']['mass'] = pendulum_mass
opensim.parameters['Model']['length'] = pendulum_length
head_inertia = pendulum_inertia - pendulum_mass * pendulum_length**2
opensim.parameters['Model']['inertia'] = head_inertia
opensim.initialize(t0=0)
fmu_parameters = fmu.get_parameters()
fmu_parameters['L'] = pendulum_length
fmu_parameters['m'] = pendulum_mass
fmu_parameters['J'] = pendulum_inertia
fmu_parameters['theta_start'] = np.deg2rad(theta0_deg)
fmu_parameters['omega_start'] = omega0
fmu.set_parameters(**fmu_parameters)
fmu.initialize(t0=0)
1.4.4. Verify Consistent Initial Conditions#
We check that all models start from the same angle and angular velocity.
for model in models.values():
outputs = model.get_outputs()
print(model.name)
keys = list(sorted(outputs.keys()))
for key in keys:
print(f" {key:>5}: {outputs[key]} ")
FMUPendulum
alpha: -12.910878069650867 rad/s²
omega: 1.0 rad/s
theta: 0.3 rad
OpenSimPendulum
alpha: -12.910878069650867 rad/s²
omega: 1.0 rad/s
theta: 0.3 rad
FEMPendulum
alpha: -12.910878069650858 rad/s²
omega: 1.0000000000000002 rad/s
theta: 0.29999999999999966 rad
1.4.5. Setup Reference Implementation#
We integrate a rigid-body pendulum ODE using scipy.integrate.solve_ivp.
This provides a baseline trajectory for sanity checking the multi-model outputs.
m = pendulum_mass
g = 9.81
L = pendulum_length
I = pendulum_inertia
def pendulum_dynamics(y: np.ndarray):
theta, omega = y
alpha = -(m * g * L * np.sin(theta)) / I
return np.array([omega, alpha])
y0 = np.array([np.deg2rad(theta0_deg), omega0])
t_end = sim_params.t_end
dt_ref = 1e-3
sol = solve_ivp(
fun=lambda t, y: pendulum_dynamics(y),
t_span=[0, t_end],
y0=y0,
method='RK45',
t_eval=np.arange(0, t_end+0.001, 0.001)
)
t_ref = sol.t
theta_ref, omega_ref = sol.y
alpha_ref = -(m * g * L * np.sin(theta_ref)) / I
At this point, parameters and initial conditions are aligned across all models. This is the minimum requirement for a meaningful switch.
We build a small dictionary to switch between models by name and choose the initial mode.
1.4.6. Time-Based Mode Selector#
A simple selector that cycles through models over fixed time intervals. This is useful for validation and debugging.
def time_based_mode_selector(t, t_end):
interval = t_end / 12
cycle_position = int(t / interval) % 3
if cycle_position == 0:
return 'FMU'
elif cycle_position == 1:
return 'OpenSim'
else:
return 'FEM'
1.4.7. State Adaptation#
Switching requires translating the state between model conventions.
We map the shared rigid-body state (q, omega, torque) to the target model.
For the FMU, state changes are applied by resetting initial conditions.
Limitations:
FMU switching resets the solver state (internal history is lost).
Switching from FEM to rigid-body is a projection: deformation states are not retained. This is best demonstrated with a stiff pendulum where elastic effects are small.
def _value(entry):
if isinstance(entry, dict) and "value" in entry:
return entry["value"]
return entry
def adapt_state(active_state, new_mode):
if new_mode == "FMU":
return {
"theta_start": active_state["theta"],
"omega_start": active_state["omega"],
"tau": active_state["tau"],
}
return active_state
1.4.8. Mode Switching Logic#
We combine the selector and state adaptation to perform controlled switches.
def switch_mode(active_model, active_mode, new_mode, t, sync_events):
active_state = active_model.get_state()
before = active_model.get_state()
adapted_state = adapt_state(active_state, new_mode)
new_model = models[new_mode]
new_model.set_state(adapted_state, t)
after = new_model.get_state()
deltas = {}
for key in ("theta", "omega", "tau"):
b = _value(before.get(key))
a = _value(after.get(key))
if b is None or a is None:
deltas[key] = None
else:
deltas[key] = a - b
sync_events.append({
"time": t,
"from": active_mode,
"to": new_mode,
"before": before,
"after": after,
"delta": deltas,
})
return new_mode, new_model
1.4.9. Time Stepping with Mode Switching#
We step the active model, retrieve its state, adapt it, and continue with the next model. This demonstrates the switching behavior end-to-end.
We start with zero torque to focus on state consistency across models.
active_mode = "FEM"
active_model = models[active_mode]
sync_events = []
# Simulation setup
t = 0.0
dt = 0.01
t_end = fem.sim_params.t_end
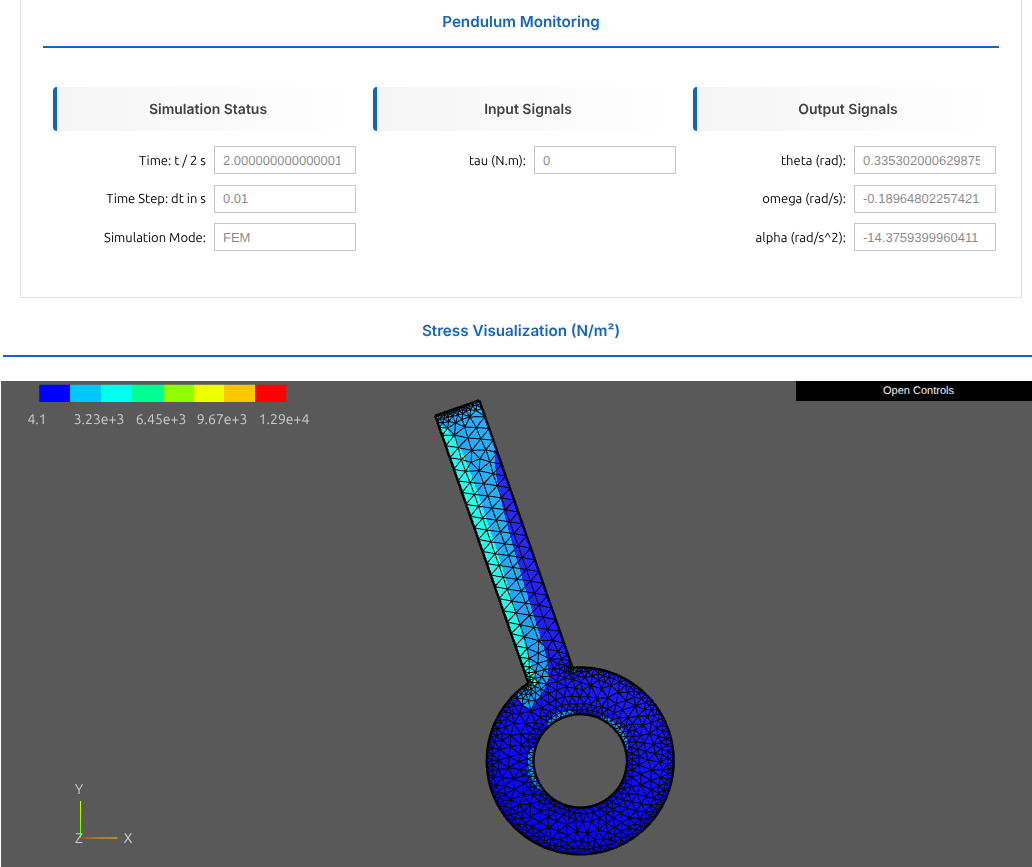
fem.setup_monitoring()
fem.display_monitoring()
fem.initialize_scene()
while t < t_end:
new_mode = time_based_mode_selector(t, t_end)
if new_mode != active_mode:
active_mode, active_model = switch_mode(active_model, active_mode, new_mode, t, sync_events)
active_model.do_step(t, dt)
t += dt
update_monitoring_and_animation(t)
1.4.10. Synchronization Events#
We list each switch along with the delta between the pre- and post-switch state in the shared rigid-body coordinates. Small deltas indicate consistent synchronization.
| t in s | From | To | Δθ | Δω | Δτ | |
|---|---|---|---|---|---|---|
| # | ||||||
| 1 | 0.000 | FEM | FMU | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 |
| 2 | 0.170 | FMU | OpenSim | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 |
| 3 | 0.340 | OpenSim | FEM | -4.1633e-17 | 1.7764e-15 | 0.0000e+00 |
| 4 | 0.500 | FEM | FMU | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 |
| 5 | 0.670 | FMU | OpenSim | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 |
| 6 | 0.840 | OpenSim | FEM | -1.8041e-16 | -8.8818e-16 | 0.0000e+00 |
| 7 | 1.000 | FEM | FMU | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 |
| 8 | 1.170 | FMU | OpenSim | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 |
| 9 | 1.340 | OpenSim | FEM | -1.3878e-16 | 1.1102e-15 | 0.0000e+00 |
| 10 | 1.500 | FEM | FMU | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 |
| 11 | 1.670 | FMU | OpenSim | 0.0000e+00 | 0.0000e+00 | 0.0000e+00 |
| 12 | 1.840 | OpenSim | FEM | 1.3878e-16 | 6.6613e-16 | 0.0000e+00 |
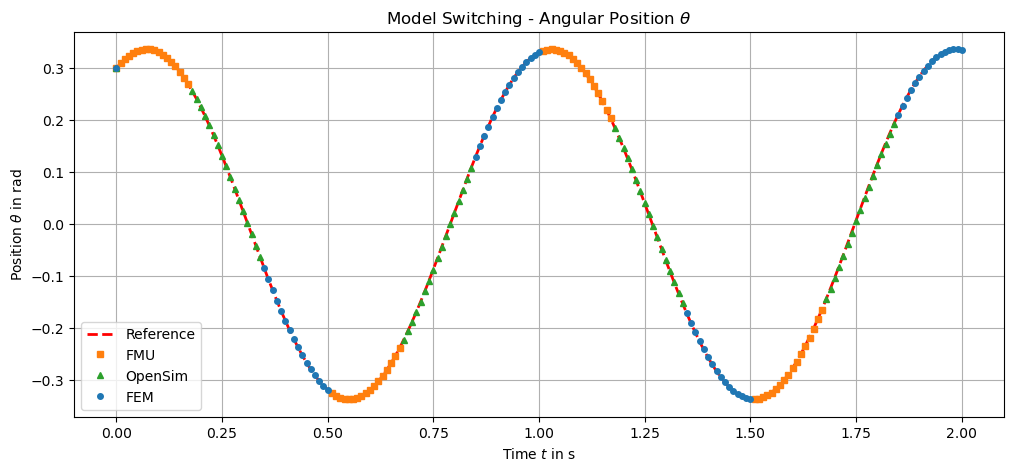
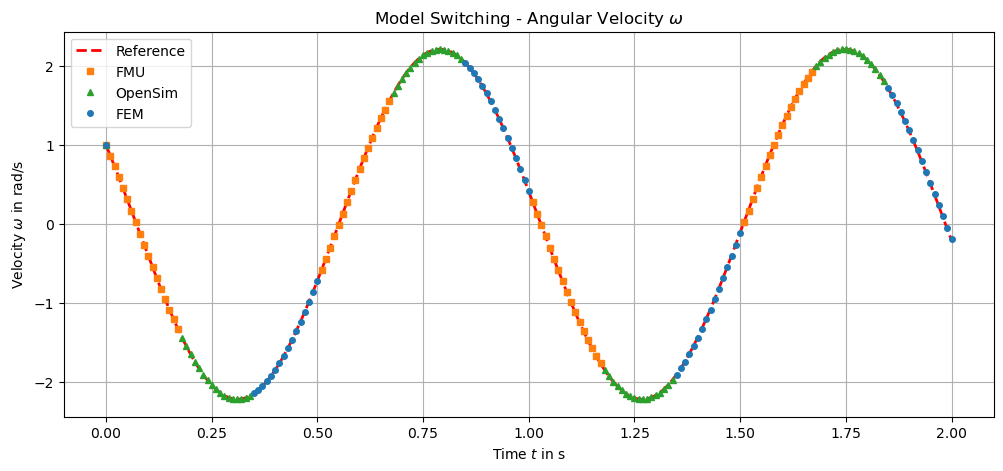
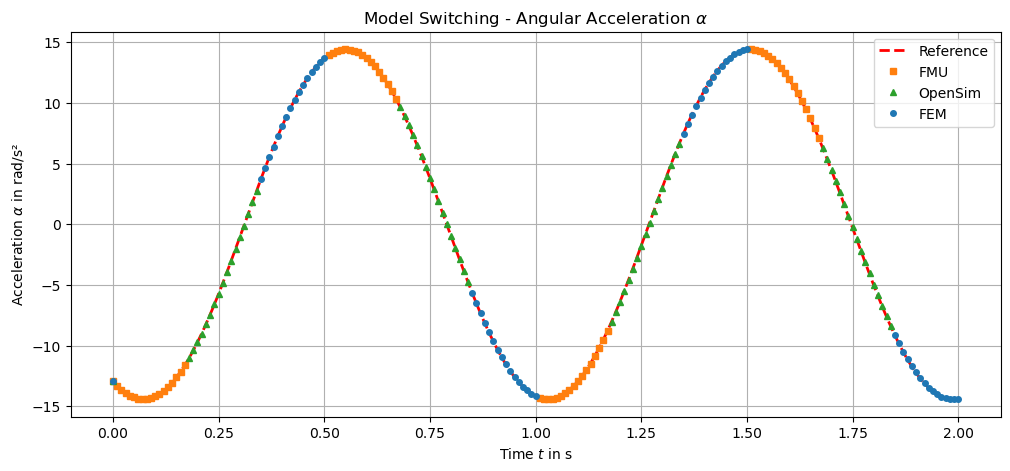
1.5. Verification of Model Switching#
We compare the multi-model output against the reference trajectory to confirm
that switching does not introduce large discontinuities in q and omega.
1.6. Conclusion#
You now have a minimal, validated workflow for reproducing the MasterPendulum
switching logic without using the class directly.