

4. Hybrid FMU Integration: Event-Driven Pendulum Simulation#
This tutorial demonstrates how to extend the FMUComponent class in syssimx with hybrid simulation capabilities using state rollback and explicit event handling.
We implement a custom FMUPendulum component that bridges continuous FMU dynamics with discrete event detection and handling. The main goal is to show how the HybridAlgorithm in syssimx enables accurate event localization through rollback mechanisms, without requiring globally small communication step sizes.
4.1. Overview#
This tutorial builds on tutorial 02 and 03, where we observed that:
FMU co-simulation detects events only at macro communication time steps.
Reducing
dtglobally improves event accuracy but increases computational cost.Direct
getFMUstate/setFMUstaterollback can preserve simulation state for Euler FMUs.
Here, we implement a hybrid FMU wrapper that combines:
Event indicators: Zero-crossing functions for continuous event detection (
theta <= 0for wall contact).Snapshot/restore: State rollback via
getFMUstate/setFMUstate(Euler) or full reinitialization (CVode).Event handling: Discrete state updates (velocity inversion) triggered by detected events.
Hybrid algorithm: Automatic event localization and iterative refinement through rollback.
The workflow is:
Define a simple
Pendulum.momodel (continuous dynamics only, no built-in events).Export FMUs with Euler and CVode solvers.
Extend
FMUComponentintoFMUPendulumwith hybrid capabilities.Configure event indicators (
wall_hit) and event connections within aSystem.Run simulations and compare Euler vs CVode performance and accuracy.
This demonstrates how external hybrid logic can be layered on top of standard FMUs without modifying the Modelica source code.
model Pendulum
// Imports
import Modelica.Constants.pi;
// Parameters
parameter Real m(unit="kg") = 40;
parameter Real L(unit="m") = 0.6;
parameter Real theta0(unit="rad") = 0;
parameter Real omega0(unit="rad/s") = 0;
parameter Real g(unit="m/s2") = 9.81;
parameter Real inertia(unit="kg.m2") = 20;
// Input torque at the pivot
Modelica.Blocks.Interfaces.RealInput torque(unit="N.m");
// Outputs
Modelica.Blocks.Interfaces.RealOutput theta(unit="rad");
Modelica.Blocks.Interfaces.RealOutput omega(unit="rad/s");
Modelica.Blocks.Interfaces.RealOutput alpha(unit="rad/s2") = der(omega);
initial equation
theta = theta0;
omega = omega0;
equation
der(theta) = omega;
der(omega) = -(m * g * L / inertia) * sin(theta) + torque / inertia;
end Pendulum;
4.2. Learning Goals#
Understand how to extend
FMUComponentwith custom hybrid simulation capabilities.Implement event indicators as zero-crossing functions for external event detection.
Use
snapshot_stateandrestore_statemethods to enable rollback for event localization.Handle discrete state transitions externally via
_handle_events_internal.Configure
Systemwith event connections and theHybridAlgorithm.Compare Euler vs CVode solver behavior under hybrid rollback scenarios.
Analyze computational performance trade-offs between solver choice and event localization accuracy.
4.3. Prerequisites and Setup#
This tutorial requires:
OpenModelica +
OMPythonfor FMU exportsyssimxwithFMUComponent,System, andHybridAlgorithmStandard Python stack:
numpy,matplotlib
We assume familiarity with:
Basic FMU co-simulation (tutorial 01)
Event sensitivity and macro step size effects (tutorial 02)
FMU state rollback mechanisms (tutorial 03)
The Modelica model used here is Pendulum.mo, which contains only continuous dynamics (no built-in when/reinit events). All event detection and handling is implemented externally in the Python wrapper.
import matplotlib.pyplot as plt
from OMPython import ModelicaSystem
from syssimx import FMUComponent
4.4. Modelica Model and FMU Export#
We use a simple pendulum model (Pendulum.mo) with:
Continuous dynamics: \(\dot{\theta} = \omega\), \(\dot{\omega} = -(mgL/I)\sin(\theta) + \tau/I\)
Parameters:
theta0,omega0(initial conditions),m,L,inertia,gNo built-in events: Unlike tutorial 02’s
PendulumDiscreteContact, this model contains nowhenclauses orreinitstatements
We export two FMI 2.0 Co-Simulation FMUs:
Euler: Fixed-step explicit Euler integration (simple, supports
getFMUstate/setFMUstate)CVode: Variable-step BDF solver (higher accuracy, limited rollback support)
The export_fmu function below uses OpenModelica’s --fmiFlags=s:solver option to specify the internal solver and returns the path to the exported FMU.
model_file = _repo / "docs/04_tool_integration/01_modelica/models/Pendulum.mo"
fmu_dir = _repo / "docs/04_tool_integration/01_modelica/fmus"
fmu_dir.mkdir(parents=True, exist_ok=True)
import shutil
def export_fmu(solver: str) -> str:
model = ModelicaSystem(
fileName=str(model_file),
modelName="Pendulum",
commandLineOptions=[f"--fmiFlags=s:{solver}", "-d=fmuExperimental"],
)
model.buildModel()
temp_path = Path(model.convertMo2Fmu(version="2.0", fmuType="cs"))
if not temp_path.exists():
raise FileNotFoundError(
f"OpenModelica did not create the expected FMU: {temp_path}\n"
f"OMC errors:\n{model.getErrorString()}"
)
dest_path = fmu_dir / f"pendulum_{solver}.fmu"
if dest_path.exists():
dest_path.unlink()
shutil.move(str(temp_path), str(dest_path))
return str(dest_path)
fmu_paths = {
"euler": export_fmu("euler"),
"cvode": export_fmu("cvode"),
}
4.5. Hybrid Extensions: The FMUPendulum Class#
To enable hybrid simulation, we extend FMUComponent with three key capabilities:
4.5.1. 1. State Snapshot and Restore#
The snapshot_state() and restore_state(snapshot, t) methods implement rollback:
Euler FMU: Uses native
getFMUstate()/setFMUstate()from FMI 2.0. Parameters must be reapplied after restore via_apply_parameters_starts()(see tutorial 03).CVode FMU: Does not reliably support state restoration. Instead, we save the continuous state (
theta,omega) and reinitialize the FMU from scratch at the restored time with updated initial conditions.
4.5.2. 2. Event Indicators#
Event indicators are zero-crossing functions \(g(\mathbf{x}, t)\) that signal discrete events. For wall contact at \(\theta = 0\):
When \(g\) crosses zero in the negative direction (\(\dot{g} < 0\)), the HybridAlgorithm detects the event and triggers localization through rollback.
4.5.3. 3. Event Handling#
The _handle_events_internal(event_names, t) method executes discrete state updates:
When
"wall_hit"is detected, we invert the velocity: \(\omega^+ = -\epsilon \omega^-\) (with restitution coefficient \(\epsilon = 1\) for elastic collision).The FMU is reinitialized with the updated state at the event time.
4.5.4. Internal Step Subdivision (Euler Only)#
For the Euler FMU, the _do_step_internal() method subdivides macro steps into smaller internal steps (\(dt_{\text{internal}} = 10^{-4}\)). This improves numerical accuracy while maintaining coarse macro communication steps for event detection.
The class definition below implements these extensions:
from syssimx.core.port import PortSpec, PortType
class FMUPendulum(FMUComponent):
def __init__(self, name: str = "Pendulum", solver: str = "euler"):
fmu_path = fmu_paths[solver]
self.solver = solver
super().__init__(name, fmu_path, group="Mechanical")
self.input_specs.update({
"omega_invert": PortSpec("omega_invert", PortType.EVENT, "in")
})
def _do_step_internal(self, t, dt):
if self.solver == "euler":
t_right = t + dt
while t < t_right - 1e-12:
dt_internal = min(1e-4, t_right - t)
super()._do_step_internal(t, dt_internal)
t += dt_internal
else:
super()._do_step_internal(t, dt)
def snapshot_state(self):
if self.solver == "euler":
return self._instance.getFMUstate()
else:
return super().get_state()
def restore_state(self, snapshot, t):
self.t = t
if self.solver == "euler":
self._instance.setFMUstate(snapshot)
self._apply_parameters_starts()
else:
theta0 = snapshot['theta']['value']
omega0 = snapshot['omega']['value']
#self._instance.reset()
self._instance.instantiate()
self._instance.setupExperiment(startTime=t)
self._instance.enterInitializationMode()
self.set_parameters(**{"theta0": theta0, "omega0": omega0})
self._apply_parameters_starts()
self._apply_input_starts()
self._instance.exitInitializationMode()
self._update_output_states(t)
self._record_outputs(t)
def _handle_events_internal(self, event_names, t):
if "wall_hit" not in event_names:
return
restitution = 1
output = self.get_outputs()
theta0 = output["theta"].magnitude
omega0 = -restitution * output["omega"].magnitude
#self._instance.reset()
self._instance.instantiate()
self._instance.setupExperiment(startTime=t)
self._instance.enterInitializationMode()
self.set_parameters(**{"theta0": theta0, "omega0": omega0})
self._apply_parameters_starts()
self._apply_input_starts()
self._instance.exitInitializationMode()
def _update_output_states(
self, t: float | None = None, event_names: list[str] | None = []
):
super()._update_output_states(t)
if event_names:
for event_name in event_names:
if event_name in self.output_specs.keys():
self.outputs[event_name].set(value=True, t=t)
else:
for out_port in self.outputs.values():
if out_port.spec.type == PortType.EVENT:
out_port.set(value=False, t=t)
4.6. Component Instantiation#
We create two FMUPendulum instances (one for each solver) and set initial conditions:
\(\theta_0 = 0.5\) rad (pendulum starts at positive angle)
\(\omega_0 = 0.0\) rad/s (released from rest)
This configuration causes the pendulum to swing down and cross \(\theta = 0\) (the wall position), triggering a contact event.
euler_pendulum = FMUPendulum("Pendulum_Euler", solver="euler")
cvode_pendulum = FMUPendulum("Pendulum_CVODE", solver="cvode")
euler_pendulum.set_parameters(theta0=0.5, omega0=0.0)
cvode_pendulum.set_parameters(theta0=0.5, omega0=0.0)
4.7. Event Indicator and Connection Setup#
4.7.1. Event Indicator Definition#
We define a zero-crossing function wall_hit_indicator that returns the pendulum angle \(\theta\). The event is triggered when:
\(\theta\) crosses zero in the negative direction (
direction=-1)This corresponds to the pendulum swinging from positive to negative angles
The add_event_indicator method registers this function with the component, enabling the HybridAlgorithm to monitor it during simulation.
4.7.2. Event Connection#
The EventConnection creates a feedback loop:
Source:
wall_hitevent output from the pendulumDestination:
omega_invertevent input on the same pendulum
When the event is detected and localized, the connection triggers _handle_events_internal(), which reinitializes the pendulum with inverted velocity.
from syssimx.system.connection import EventConnection
def wall_hit_indicator(comp: FMUPendulum) -> float:
return comp.get_outputs()["theta"].magnitude
euler_pendulum.add_event_indicator(
name="wall_hit", func=wall_hit_indicator, direction=-1,
)
cvode_pendulum.add_event_indicator(
name="wall_hit", func=wall_hit_indicator, direction=-1,
)
event_conn_euler = EventConnection(
src_comp=euler_pendulum.name,
src_port="wall_hit",
dst_comp=euler_pendulum.name,
dst_port="omega_invert"
)
event_conn_cvode = EventConnection(
src_comp=cvode_pendulum.name,
src_port="wall_hit",
dst_comp=cvode_pendulum.name,
dst_port="omega_invert"
)
4.8. System Initialization and Visualization#
We create a System instance and add:
The
FMUPendulumcomponentThe event connection (self-loop for event handling)
The HybridAlgorithm is automatically selected when event indicators are present. The system graph visualization shows:
Component nodes (pendulum)
Event connection edges (wall_hit → omega_invert)
This architecture enables the hybrid simulation loop:
Integrate continuous dynamics with macro step
dtEvaluate event indicators at each step
If zero-crossing detected: rollback, bisect, localize event time
Execute event handler, reinitialize FMU
Continue integration
from syssimx import System
from syssimx.viz.system_graph_visualizer import SystemGraphVisualizer
system_euler = System(name="System - Euler")
system_euler.add_component(euler_pendulum)
system_euler.add_event_connection(event_conn_euler)
system_euler.initialize(t0=0.0)
system_cvode = System(name="System - CVODE")
system_cvode.add_component(cvode_pendulum)
system_cvode.add_event_connection(event_conn_cvode)
system_cvode.initialize(t0=0.0)
visualizer_euler = SystemGraphVisualizer(system_euler)
visualizer_euler.visualize()

4.9. Hybrid Algorithm Configuration#
The HybridAlgorithm parameters control event localization accuracy:
record_internal_steps = False: Only record macro communication steps (not rollback iterations)tol_time = 1e-9: Event time localization tolerance (bisection stops when \(|t_{\text{left}} - t_{\text{right}}| < 10^{-9}\) s)tol_value = 1e-9: Event indicator value tolerance (accept event when \(|g(t)| < 10^{-9}\))
These tight tolerances ensure precise event detection, at the cost of more rollback iterations per event.
import logging
logging.basicConfig(
level=logging.WARNING, # keep third-party loggers quiet
format="[%(module)s] %(levelname)s: %(message)s",
)
# Enable debug output for the syssimx package
logging.getLogger("syssimx").setLevel(logging.DEBUG)
system_euler.algorithm.record_internal_steps = False
system_euler.algorithm.tol_time = 1e-9
system_euler.algorithm.tol_value = 1e-9
t0 = 0.0
tf = 1.0
dt = 0.05
system_euler.run(t0, tf, dt)
[system] INFO: Starting simulation run from t=0.0 to t=1.0 with dt=0.05
[hybrid] INFO: ================================================================================
[hybrid] INFO: Event crossing in [0.450000, 0.500000]: Pendulum_Euler.wall_hit
[hybrid] DEBUG: Starting bisection for event localization ...
[hybrid] DEBUG: Indicators at left (t=0.45000000): {'Pendulum_Euler': {'wall_hit': 0.025595701207108773}}
[hybrid] DEBUG: Indicators at right (t=0.50000000): {'Pendulum_Euler': {'wall_hit': -0.059159615386525116}}
[hybrid] DEBUG: Bisection iteration 1: interval [0.45000000, 0.50000000]
[hybrid] DEBUG: Bisection iteration 2: interval [0.45000000, 0.47500000]
[hybrid] DEBUG: Bisection iteration 3: interval [0.46250000, 0.47500000]
[hybrid] DEBUG: Bisection iteration 4: interval [0.46250000, 0.46875000]
[hybrid] DEBUG: Bisection iteration 5: interval [0.46250000, 0.46562500]
[hybrid] DEBUG: Bisection iteration 6: interval [0.46406250, 0.46562500]
[hybrid] DEBUG: Bisection iteration 7: interval [0.46484375, 0.46562500]
[hybrid] DEBUG: Bisection iteration 8: interval [0.46484375, 0.46523437]
[hybrid] DEBUG: Bisection iteration 9: interval [0.46503906, 0.46523437]
[hybrid] DEBUG: Bisection iteration 10: interval [0.46503906, 0.46513672]
[hybrid] DEBUG: Bisection iteration 11: interval [0.46503906, 0.46508789]
[hybrid] DEBUG: Bisection iteration 12: interval [0.46506348, 0.46508789]
[hybrid] DEBUG: Bisection iteration 13: interval [0.46507568, 0.46508789]
[hybrid] DEBUG: Bisection iteration 14: interval [0.46507568, 0.46508179]
[hybrid] DEBUG: Bisection iteration 15: interval [0.46507874, 0.46508179]
[hybrid] DEBUG: Bisection iteration 16: interval [0.46507874, 0.46508026]
[hybrid] DEBUG: Bisection iteration 17: interval [0.46507950, 0.46508026]
[hybrid] DEBUG: Bisection iteration 18: interval [0.46507950, 0.46507988]
[hybrid] DEBUG: Bisection iteration 19: interval [0.46507950, 0.46507969]
[hybrid] DEBUG: Bisection iteration 20: interval [0.46507950, 0.46507959]
[hybrid] DEBUG: Bisection iteration 21: interval [0.46507955, 0.46507959]
[hybrid] DEBUG: Bisection iteration 22: interval [0.46507955, 0.46507957]
[hybrid] DEBUG: Indicator Pendulum_Euler.wall_hit = -7.5429e-10
[hybrid] INFO: Event located at t=0.46507956
[hybrid] DEBUG: Events at located time: Pendulum_Euler.wall_hit
[hybrid] INFO: Handling 1 event(s) at t=0.46507956, micro=0: Pendulum_Euler.wall_hit
[hybrid] DEBUG: Events grouped by listener: {'Pendulum_Euler': ['wall_hit']}
[hybrid] INFO: ================================================================================
[system] INFO: Simulation completed in 0.18 seconds
system_cvode.algorithm.record_internal_steps = False
system_cvode.algorithm.tol_time = 1e-9
system_cvode.algorithm.tol_value = 1e-9
system_cvode.run(t0, tf, dt)
[system] INFO: Starting simulation run from t=0.0 to t=1.0 with dt=0.05
[hybrid] INFO: ================================================================================
[hybrid] INFO: Event crossing in [0.450000, 0.500000]: Pendulum_CVODE.wall_hit
[hybrid] DEBUG: Starting bisection for event localization ...
[hybrid] DEBUG: Indicators at left (t=0.45000000): {'Pendulum_CVODE': {'wall_hit': 0.025592647437108675}}
[hybrid] DEBUG: Indicators at right (t=0.50000000): {'Pendulum_CVODE': {'wall_hit': -0.059136336124719344}}
[hybrid] DEBUG: Bisection iteration 1: interval [0.45000000, 0.50000000]
[hybrid] DEBUG: Bisection iteration 2: interval [0.45000000, 0.47500000]
[hybrid] DEBUG: Bisection iteration 3: interval [0.46250000, 0.47500000]
[hybrid] DEBUG: Bisection iteration 4: interval [0.46250000, 0.46875000]
[hybrid] DEBUG: Bisection iteration 5: interval [0.46250000, 0.46562500]
[hybrid] DEBUG: Bisection iteration 6: interval [0.46406250, 0.46562500]
[hybrid] DEBUG: Bisection iteration 7: interval [0.46484375, 0.46562500]
[hybrid] DEBUG: Bisection iteration 8: interval [0.46484375, 0.46523437]
[hybrid] DEBUG: Bisection iteration 9: interval [0.46503906, 0.46523437]
[hybrid] DEBUG: Bisection iteration 10: interval [0.46503906, 0.46513672]
[hybrid] DEBUG: Bisection iteration 11: interval [0.46503906, 0.46508789]
[hybrid] DEBUG: Bisection iteration 12: interval [0.46506348, 0.46508789]
[hybrid] DEBUG: Bisection iteration 13: interval [0.46507568, 0.46508789]
[hybrid] DEBUG: Bisection iteration 14: interval [0.46508179, 0.46508789]
[hybrid] DEBUG: Bisection iteration 15: interval [0.46508179, 0.46508484]
[hybrid] DEBUG: Bisection iteration 16: interval [0.46508179, 0.46508331]
[hybrid] DEBUG: Bisection iteration 17: interval [0.46508179, 0.46508255]
[hybrid] DEBUG: Bisection iteration 18: interval [0.46508179, 0.46508217]
[hybrid] DEBUG: Bisection iteration 19: interval [0.46508198, 0.46508217]
[hybrid] DEBUG: Bisection iteration 20: interval [0.46508207, 0.46508217]
[hybrid] DEBUG: Bisection iteration 21: interval [0.46508212, 0.46508217]
[hybrid] DEBUG: Bisection iteration 22: interval [0.46508214, 0.46508217]
[hybrid] DEBUG: Bisection iteration 23: interval [0.46508216, 0.46508217]
[hybrid] DEBUG: Bisection iteration 24: interval [0.46508216, 0.46508217]
[hybrid] DEBUG: Bisection iteration 25: interval [0.46508217, 0.46508217]
[hybrid] DEBUG: Indicator Pendulum_CVODE.wall_hit = 1.2651e-07
[hybrid] INFO: Event located at t=0.46508217
[hybrid] DEBUG: Events at located time:
[hybrid] INFO: ================================================================================
[hybrid] INFO: ================================================================================
[hybrid] INFO: Event crossing in [0.465082, 0.500000]: Pendulum_CVODE.wall_hit
[hybrid] DEBUG: Starting bisection for event localization ...
[hybrid] DEBUG: Indicators at left (t=0.46508217): {'Pendulum_CVODE': {'wall_hit': 1.2650559052148518e-07}}
[hybrid] DEBUG: Indicators at right (t=0.50000000): {'Pendulum_CVODE': {'wall_hit': -0.05913571616814688}}
[hybrid] DEBUG: Bisection iteration 1: interval [0.46508217, 0.50000000]
[hybrid] DEBUG: Bisection iteration 2: interval [0.46508217, 0.48254108]
[hybrid] DEBUG: Bisection iteration 3: interval [0.46508217, 0.47381163]
[hybrid] DEBUG: Bisection iteration 4: interval [0.46508217, 0.46944690]
[hybrid] DEBUG: Bisection iteration 5: interval [0.46508217, 0.46726453]
[hybrid] DEBUG: Bisection iteration 6: interval [0.46508217, 0.46617335]
[hybrid] DEBUG: Bisection iteration 7: interval [0.46508217, 0.46562776]
[hybrid] DEBUG: Bisection iteration 8: interval [0.46508217, 0.46535496]
[hybrid] DEBUG: Bisection iteration 9: interval [0.46508217, 0.46521857]
[hybrid] DEBUG: Bisection iteration 10: interval [0.46508217, 0.46515037]
[hybrid] DEBUG: Bisection iteration 11: interval [0.46508217, 0.46511627]
[hybrid] DEBUG: Bisection iteration 12: interval [0.46508217, 0.46509922]
[hybrid] DEBUG: Bisection iteration 13: interval [0.46508217, 0.46509069]
[hybrid] DEBUG: Bisection iteration 14: interval [0.46508217, 0.46508643]
[hybrid] DEBUG: Bisection iteration 15: interval [0.46508217, 0.46508430]
[hybrid] DEBUG: Bisection iteration 16: interval [0.46508217, 0.46508323]
[hybrid] DEBUG: Bisection iteration 17: interval [0.46508217, 0.46508270]
[hybrid] DEBUG: Bisection iteration 18: interval [0.46508217, 0.46508243]
[hybrid] DEBUG: Bisection iteration 19: interval [0.46508217, 0.46508230]
[hybrid] DEBUG: Bisection iteration 20: interval [0.46508223, 0.46508230]
[hybrid] DEBUG: Bisection iteration 21: interval [0.46508223, 0.46508227]
[hybrid] DEBUG: Bisection iteration 22: interval [0.46508223, 0.46508225]
[hybrid] DEBUG: Indicator Pendulum_CVODE.wall_hit = -6.9211e-10
[hybrid] INFO: Event located at t=0.46508224
[hybrid] DEBUG: Events at located time: Pendulum_CVODE.wall_hit
[hybrid] INFO: Handling 1 event(s) at t=0.46508224, micro=0: Pendulum_CVODE.wall_hit
[hybrid] DEBUG: Events grouped by listener: {'Pendulum_CVODE': ['wall_hit']}
[hybrid] INFO: ================================================================================
[system] INFO: Simulation completed in 0.38 seconds
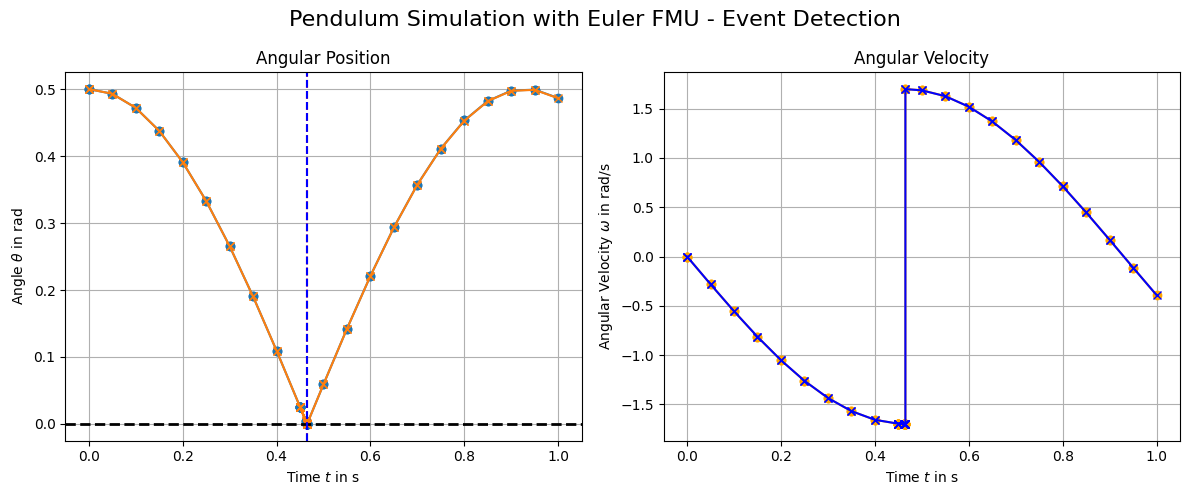
4.9.1. Euler Results: Event Detection Summary#
The plot below visualizes the simulation trajectory with event markers.
history = system_euler.get_history()
t_vals, data = history["Pendulum_Euler"]
theta_vals = data["theta"]
omega_vals = data["omega"]
event_history = system_euler.history.get_all_event_histories()
zero_crossings = event_history.get((euler_pendulum.name, "wall_hit"), [])
event_time = zero_crossings[0].t if zero_crossings else None
event_time
0.46507955789566036
history_cvode = system_cvode.get_history()
t_vals_cvode, data_cvode = history_cvode["Pendulum_CVODE"]
theta_vals_cvode = data_cvode["theta"]
omega_vals_cvode = data_cvode["omega"]
event_history_cvode = system_cvode.history.get_all_event_histories()
zero_crossings_cvode = event_history_cvode.get((cvode_pendulum.name, "wall_hit"), [])
event_time_cvode = zero_crossings_cvode[0].t if zero_crossings_cvode else None
event_time_cvode
0.4650822430145243
plt.figure(figsize=(12, 5))
plt.suptitle("Pendulum Simulation with Euler FMU - Event Detection", fontsize=16)
plt.subplot(1, 2, 1)
plt.title("Angular Position")
plt.plot(t_vals, theta_vals, label="theta", marker='o')
plt.plot(t_vals_cvode, theta_vals_cvode, label="theta (CVODE)", marker='x')
plt.axhline(0, color='k', linestyle='--', linewidth=2)
plt.axvline(event_time, color='red', linestyle='--', label='Detected Event (theta=0)')
plt.axvline(event_time_cvode, color='blue', linestyle='--', label='Detected Event (theta=0) (CVODE)')
plt.xlabel(r"Time $t$ in s")
plt.ylabel(r"Angle $\theta$ in rad")
plt.grid()
plt.subplot(1, 2, 2)
plt.title("Angular Velocity")
plt.plot(t_vals, omega_vals, label="omega", color="orange", marker='o')
plt.plot(t_vals_cvode, omega_vals_cvode, label="omega (CVODE)", color="blue", marker='x')
plt.xlabel(r"Time $t$ in s")
plt.ylabel(r"Angular Velocity $\omega$ in rad/s")
plt.grid()
plt.tight_layout()
plt.show()
4.10. Conclusion#
This tutorial demonstrated how to extend FMUComponent with hybrid simulation capabilities:
External event handling: We added discrete event logic (wall contact detection and velocity inversion) to a continuous-only Modelica model without modifying the source code.
Rollback implementation: Two approaches were shown:
Euler: Efficient native
getFMUstate/setFMUstateCVode: Full reinitialization workaround (slower, less accurate)
System-level integration: The
HybridAlgorithmautomatically orchestrates event detection, rollback, bisection, and event handling through a declarative API.
Recommendations
Use Euler FMUs for hybrid systems with frequent events when rollback is critical
Use CVode FMUs for stiff continuous systems with infrequent events
Internal step subdivision (as shown in
_do_step_internal) can improve Euler accuracy without impacting event detection