

3. FMU: Rollback Mechanism#
This tutorial introduces the practical rollback behavior of FMI 2.0 co-simulation FMUs exported from Modelica and used in syssimx.
The focus is not event handling yet. The goal is to establish whether snapshot and restore operations are reliable for different FMU solver backends (euler, cvode), since this is a prerequisite for robust hybrid event localization.
3.1. Overview#
We will:
Export
Pendulum.moas FMI 2.0 co-simulation FMUs (euler,cvode).Inspect the FMU capability flag
canGetAndSetFMUstate.Perform a practical two-pass restore test (
t0 -> t1 -> t2, restore att1, rerunt1 -> t2).Compare rollback behavior for Euler and CVode FMUs.
Derive implementation implications for
FMUComponentextensions in later hybrid tutorials.
3.2. Learning Goals#
Understand why rollback-capable components are required for hybrid co-simulation.
Distinguish formal FMU capability flags from practical runtime behavior.
Understand solver-dependent restore strategies for Modelica FMUs.
Prepare the transition to explicit event localization and event handling in subsequent tutorials.
3.3. Prerequisites and Setup#
We assume the setup from tutorials 01 and 02:
OpenModelica +
OMPythonsyssimxenvironment withFMUComponentnumpyandmatplotlib
Model used here: Pendulum.mo (continuous pendulum without internal contact model).
import numpy as np
import matplotlib.pyplot as plt
from OMPython import ModelicaSystem
from syssimx import FMUComponent
3.4. Theory: Rollback for Hybrid FMU Simulation#
In hybrid co-simulation, state events can occur inside a macro interval [t, t+dt]. To localize event time accurately (e.g., by bisection), the master algorithm needs repeatable rollback operations:
save a snapshot at the left boundary,
perform trial integration,
restore the previous snapshot,
repeat until the event time is localized.
Therefore, robust hybrid simulation depends on reliable component methods analogous to snapshot_state() and restore_state(), not only on event-indicator evaluation.
3.5. Modelica Source Model#
We reuse the pendulum model from tutorial 01 (Pendulum.mo) to isolate rollback behavior from contact/event-model complexity.
Using a continuous model here keeps the restore test minimal and directly attributable to FMU solver-state behavior.
model_file = _repo / "docs/04_tool_integration/01_modelica/models/Pendulum.mo"
fmu_dir = _repo / "docs/04_tool_integration/01_modelica/fmus"
fmu_dir.mkdir(parents=True, exist_ok=True)
3.6. Export FMUs#
We export two FMI 2.0 Co-Simulation FMUs from the same Modelica model:
eulercvode
This keeps model equations fixed and isolates the influence of solver-internal state handling on rollback behavior.
import shutil
def export_fmu(solver: str) -> str:
model = ModelicaSystem(
fileName=str(model_file),
modelName="Pendulum",
commandLineOptions=[f"--fmiFlags=s:{solver}", "-d=fmuExperimental"],
)
model.buildModel()
temp_path = Path(model.convertMo2Fmu(version="2.0", fmuType="cs"))
if not temp_path.exists():
raise FileNotFoundError(
f"OpenModelica did not create the expected FMU: {temp_path}\n"
f"OMC errors:\n{model.getErrorString()}"
)
dest_path = fmu_dir / f"pendulum_{solver}.fmu"
if dest_path.exists():
dest_path.unlink()
shutil.move(str(temp_path), str(dest_path))
return str(dest_path)
fmu_paths = {
"euler": export_fmu("euler"),
"cvode": export_fmu("cvode"),
}
3.7. Solver-Specific FMU State Capability#
The FMI capability flag canGetAndSetFMUstate is informative, but hybrid simulation requires a practical verification.
We apply the following restore test:
simulate from
t0tot1and store a snapshot,simulate from
t1tot2(first pass),restore the snapshot at
t1,simulate again from
t1tot2(second pass).
If restore is operational, first and second pass should overlap over [t1, t2].
comp = FMUComponent(name="PendulumEuler", fmu_path=fmu_paths["euler"])
comp.initialize(t0=0.0)
comp.set_inputs({"torque": 30})
t_interval = 3
dt = 1e-4
time_points_1 = np.arange(0, t_interval + dt, dt)
time_points_2 = np.arange(t_interval, 2 * t_interval + dt, dt)
for t in time_points_1:
comp.do_step(t, dt)
t_rollback = t_interval
state = comp._instance.getFMUState()
for t in time_points_2:
comp.do_step(t, dt)
t_vals_1, values = comp.get_history_arrays()
comp.history.clear()
comp._instance.setFMUState(state)
comp._apply_parameters_starts()
comp.set_inputs({"torque": 30})
for t in time_points_2:
comp.do_step(t, dt)
t_vals_2, values_2 = comp.get_history_arrays()
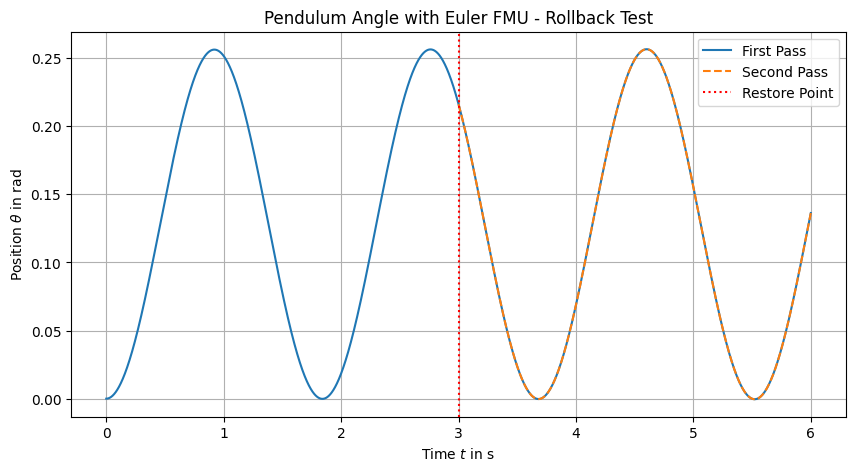
We can see in the figure above that the euler FMU shows perfect overlap. The second pass (dashed) is indistinguishable from the first pass (solid), confirming that the snapshot/restore mechanism works reliably for this FMU with the Euler solver.
comp = FMUComponent(name="PendulumCvode", fmu_path=fmu_paths["cvode"])
comp.initialize(t0=0.0)
comp.set_inputs({"torque": 30})
t_interval = 3
dt = 0.001
time_points_1 = np.arange(0, t_interval + dt, dt)
time_points_2 = np.arange(t_interval, 2 * t_interval + dt, dt)
for t in time_points_1:
comp.do_step(t, dt)
t_rollback = t_interval
state = comp._instance.getFMUState()
for t in time_points_2:
comp.do_step(t, dt)
t_vals_1, values = comp.get_history_arrays()
comp.history.clear()
comp._instance.setFMUState(state)
comp._apply_parameters_starts()
comp.set_inputs({"torque": 30})
try:
for t in time_points_2:
comp.do_step(t, dt)
except Exception as e:
print(f"{100 * '='}\nAn error occurred during the second run:\n{e}\n{100 * '='}")
finally:
print("Requires Reinitialization:")
print(f" 1) Evaluate state variables theta and omega at the restore point (t={t_rollback} s).")
print(f" 2) Reset the component and set the initial conditions to the evaluated state variables.")
print(f" 3) Reinitialize the component and rerun the second pass.\n{100 * '='}")
state = comp.get_outputs()
comp.reset()
comp.set_parameters(**{'theta0': state["theta"],
'omega0': state["omega"]})
comp.initialize(t0=t_rollback)
comp.set_inputs({"torque": 30})
for t in time_points_2:
comp.do_step(t, dt)
t_vals_2, values_2 = comp.get_history_arrays()
====================================================================================================
An error occurred during the second run:
fmi2DoStep failed with status 4 (fatal).
====================================================================================================
Requires Reinitialization:
1) Evaluate state variables theta and omega at the restore point (t=3 s).
2) Reset the component and set the initial conditions to the evaluated state variables.
3) Reinitialize the component and rerun the second pass.
====================================================================================================
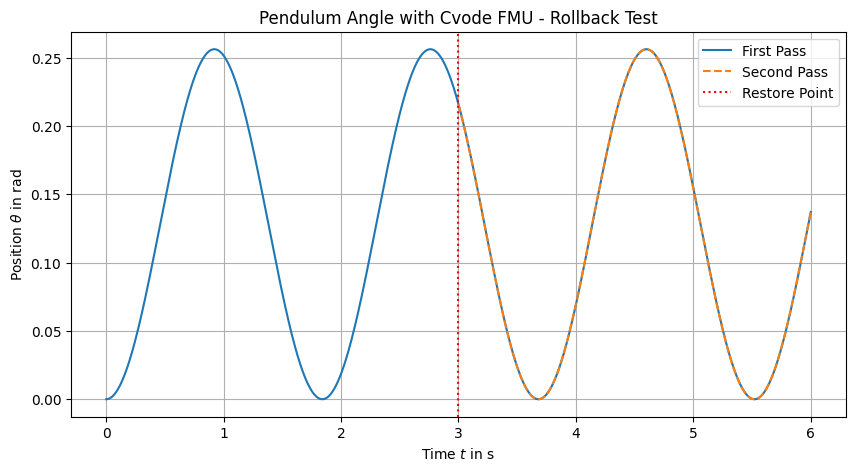
3.8. Conclusion#
This tutorial shows a solver-dependent rollback behavior for Modelica FMUs in co-simulation:
Euler FMU: practical restore via
getFMUState/setFMUStateis feasible in this setup.CVode FMU: direct rollback to earlier communication times is not reliably supported in the same way; reinitialization with reconstructed state is required.
This is the key motivation for the next step in the tutorial sequence: extending FMUComponent in syssimx with explicit rollback strategy and event-handling logic suitable for hybrid state-event localization.