

Modelica / FMU#
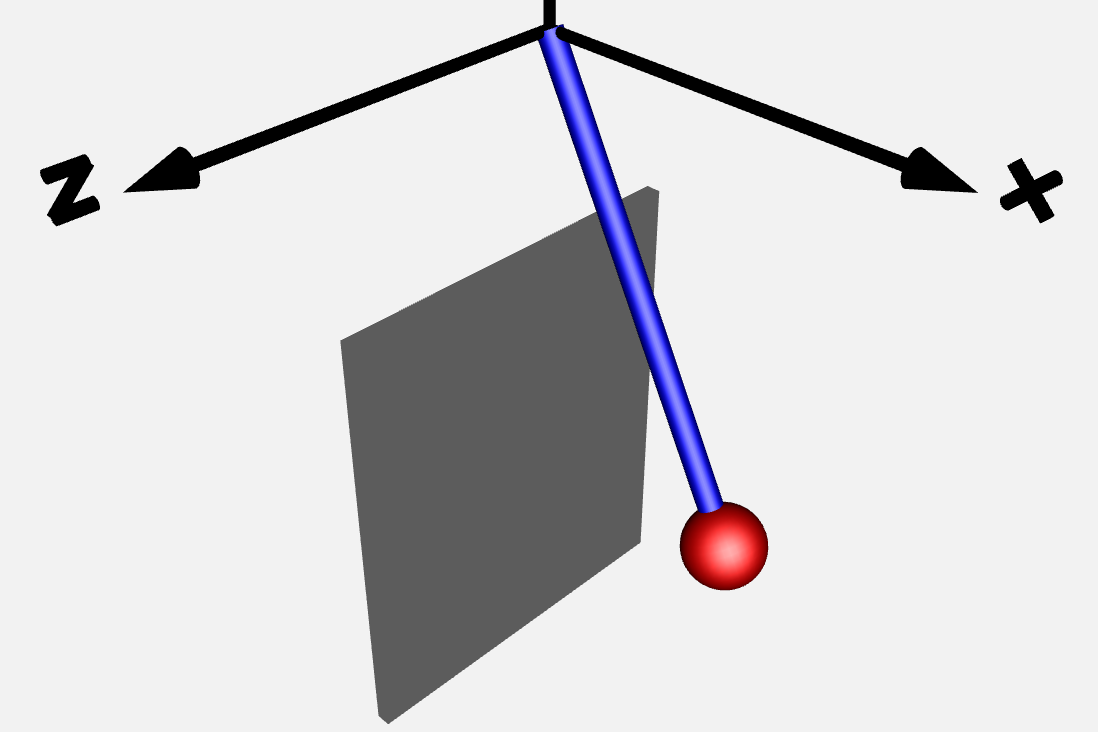
Visualization of the Modelica Pendulum Model with wall contact.#
This sequence covers a Modelica pendulum workflow from direct simulation to FMI co-simulation, then moves into hybrid event handling with rollback-based event localization.
Main takeaways across the four notebooks:
The same pendulum dynamics are used in direct Modelica simulation (
OMPython.ModelicaSystem) and FMU co-simulation (syssimx.FMUComponent).Solver and macro-step choices strongly affect co-simulation accuracy, especially around events.
Discrete contact in FMUs exposes event-time sensitivity at communication boundaries when no localization strategy is used.
Robust hybrid simulation requires reliable rollback; solver backend (Euler vs CVode) changes how rollback must be implemented.
What each tutorial does:
01_modelica_pendulum_basicsIntroduces the pendulum Modelica model with input/output interfaces.
Compares direct Modelica solver behavior (dassl, cvode, euler) and FMU behavior under the same forcing.
Exports FMI 2.0 co-simulation FMUs and quantifies step-size/solver accuracy differences.
02_modelica_pendulum_contactExtends the model with discrete wall contact using when and reinit.
Compares direct Modelica event localization against FMU co-simulation at different macro step sizes.
Shows that coarse communication steps reduce event-time observability accuracy.
03_fmu_rollback_mechanismValidates rollback behavior with practical snapshot/restore tests after FMU export.
Confirms solver-dependent behavior: Euler supports practical FMU-state restore in this setup, while CVode needs reinitialization-based restore.
Establishes rollback constraints needed for hybrid event localization.
04_fmu_hybrid_pendulumImplements a custom hybrid FMU wrapper with event indicators, rollback, and external event handling.
Uses the HybridAlgorithm for event localization and discrete updates (impact handling) without embedding events in the Modelica source.
Benchmarks Euler vs CVode trade-offs for hybrid simulations with frequent events.